R&D Activities研究開発の紹介
無⼈航空機・陸上ロボット・⽔中ロボットの性能評価⼿法の研究開発終了事業
新規ユーザー登録後、プロジェクト番号「P17004」で検索していただくと、順次公開される成果報告書をご確認いただけます。
リンク: 国立研究開発法人 新エネルギー・産業技術総合開発機構 成果報告書データベース
| 実施先 | 株式会社自律制御システム研究所(ACSL)/富士通株式会社/日本電気株式会社(NEC)/株式会社イクシス/株式会社エンルート/株式会社プロドローン/パナソニック株式会社/パナソニックシステムソリューションズジャパン株式会社/朝日航洋株式会社/株式会社SUBARU/三菱重工株式会社/一般財団法人 製造科学技術センター/国立研究開発法人 産業技術総合研究所(AIST)/国立大学法人 東京大学/イームズロボティクス株式会社/独立行政法人 労働者健康安全機構 |
|---|---|
| 契約種別 | 委託 |
| 研究開発の概要 | 研究開発の目的・目標
実践的なロボットテストフィールドを活用しながら、各種ロボットの性能評価基準を策定することで、 省エネルギー化を実現するロボットの開発を促進する
研究開発の実施内容
各種ロボット(無人航空機、陸上ロボット、水中ロボット)の性能評価基準を、 分野(物流・インフラ点検・災害調査)及びロボット毎に策定する
研究開発方法
・ユースケース毎に、既存ロボットによる各種試験を行った後、結果データを基に求められる性能レベルを設定 ・それを踏まえてロボットを開発 ・開発ロボットによる各種試験を実施 福島ロボットテストフィールド(以下、福島RTFと表記)を活用し、このサイクルを繰り返すことで、 最適な性能評価の手法を研究開発
研究開発期間
平成28年度~29年度 |
| 研究開発成果 |
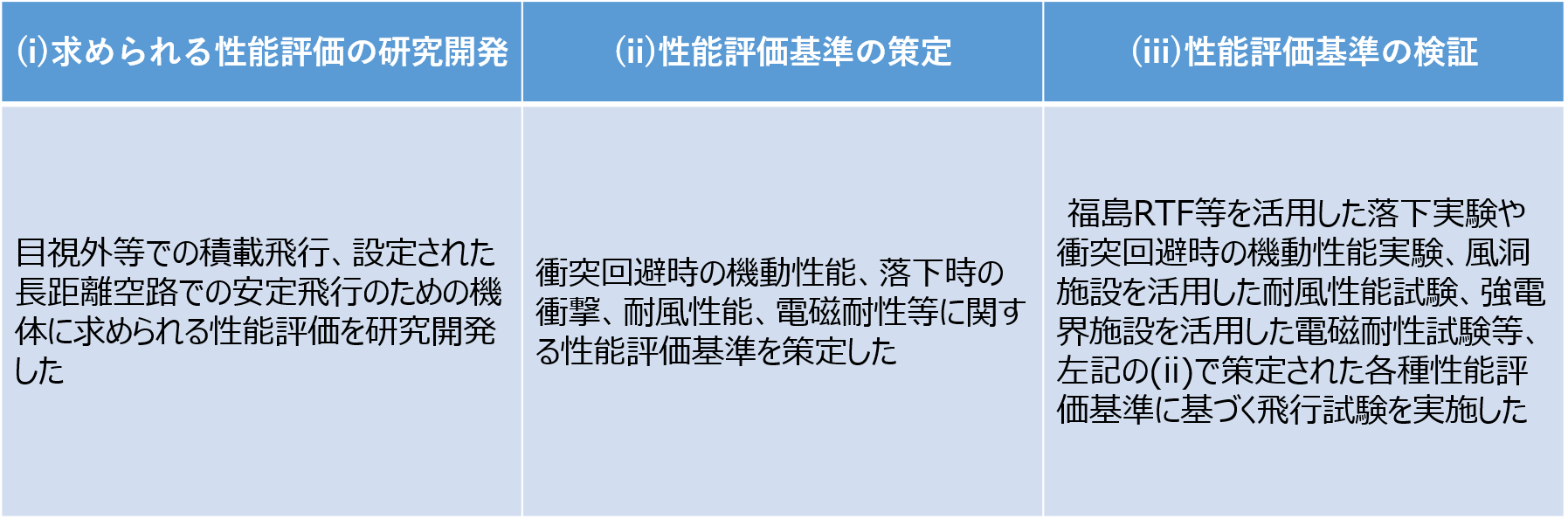
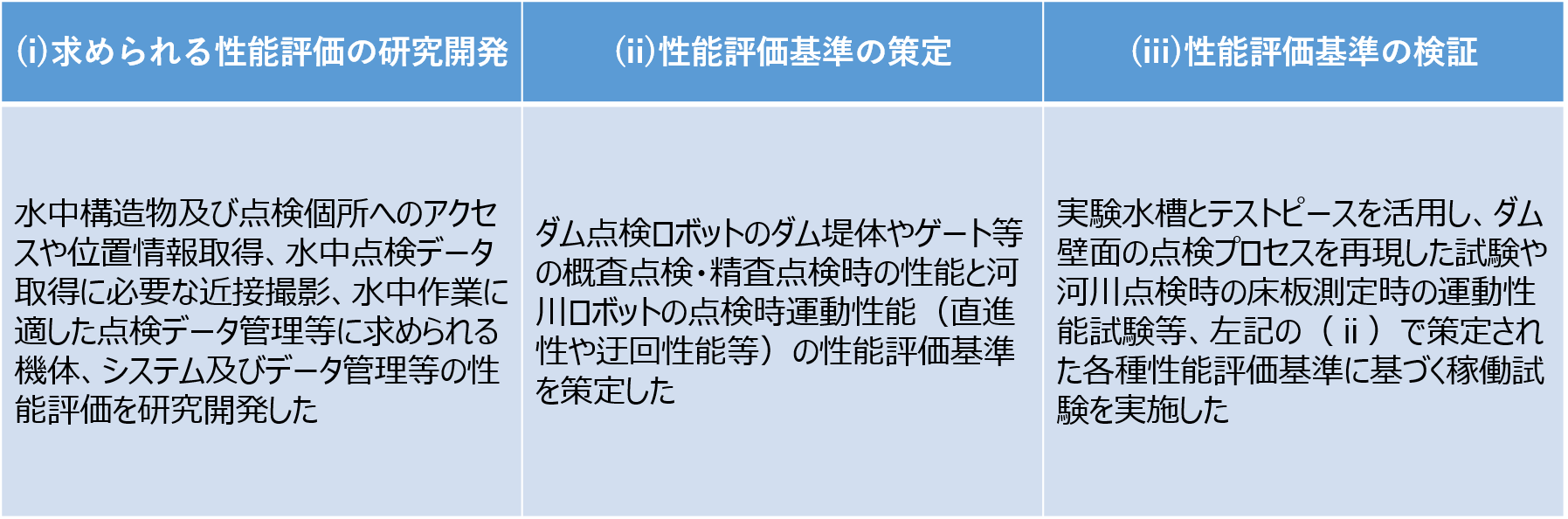
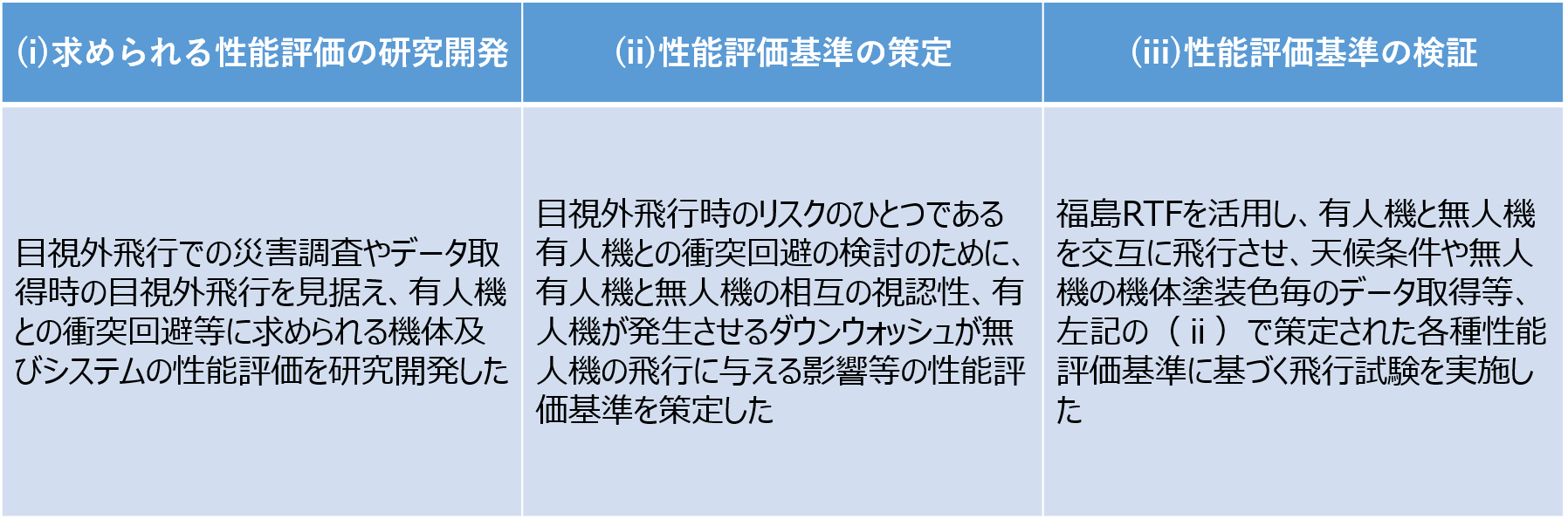
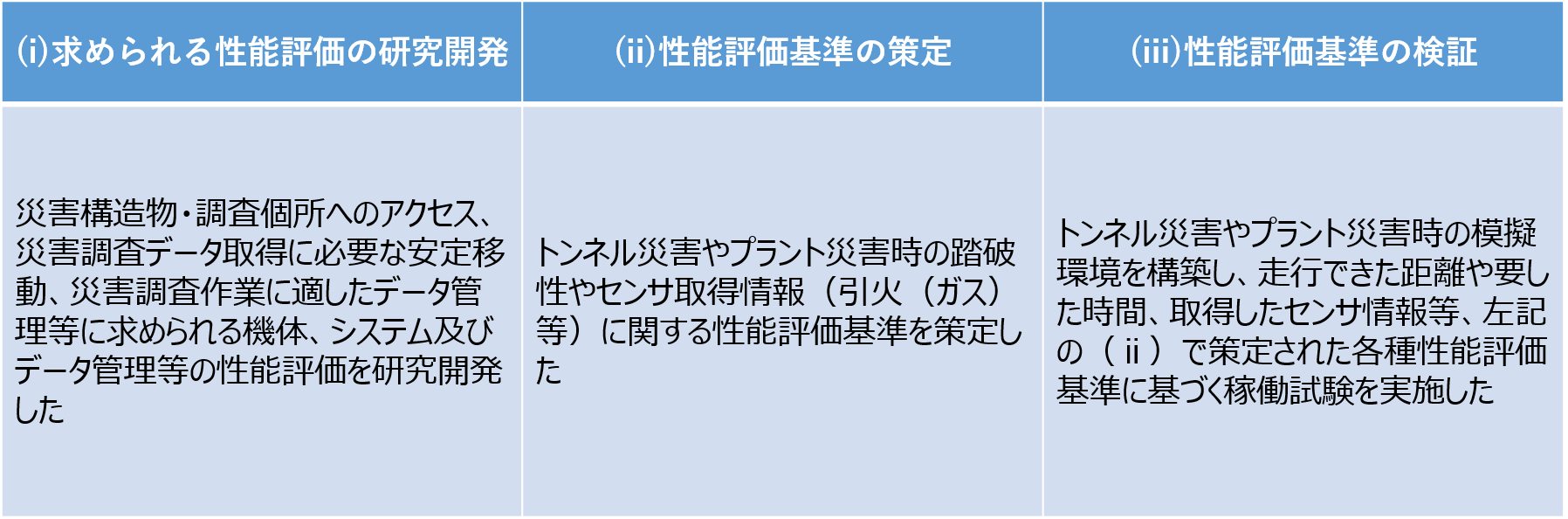
1.各種ロボットの性能評価基準等の研究開発
各分野における研究開発を実施し、性能評価基準等の検証を実施しました。
〈無人航空機を活用した物流分野〉 |
| 活動状況・お知らせなど |
【関係報道発表及び実証動画】 NEDO Channel https://www.youtube.com/watch?v=eK4iM_fuAyg&list=PLZH3AKTCrVsVobxpkL8S8bE7vdUYipqOP
インフラ維持管理用ロボットの開発を強化、基準作りにも着手 http://www.nedo.go.jp/news/press/AA5_100591.html
世界初・完全自律制御ドローンでの長距離荷物配送を実証 http://www.nedo.go.jp/news/press/AA5_100704.html
日本初、同一空域で有人ヘリコプターと無人航空機の安全性能試験を福島県で実施 http://www.nedo.go.jp/news/press/AA5_100887.html
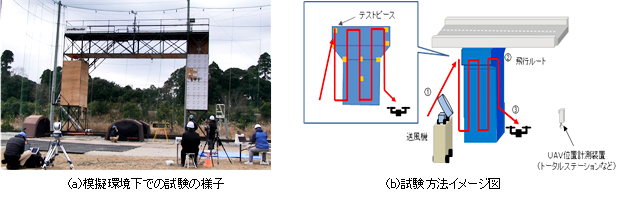
橋梁点検に用いる無人航空機の性能評価基準策定に向けた飛行試験を実施 http://www.nedo.go.jp/news/press/AA5_100895.html
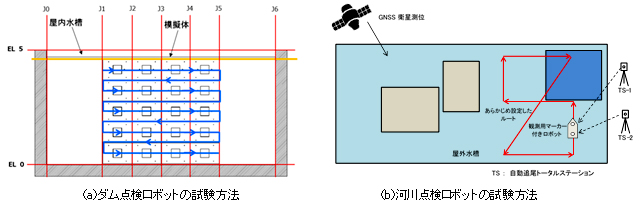
ダム・河川の水中点検ロボットの性能評価基準策定に向けた試験を実施 http://www.nedo.go.jp/news/press/AA5_100906.html
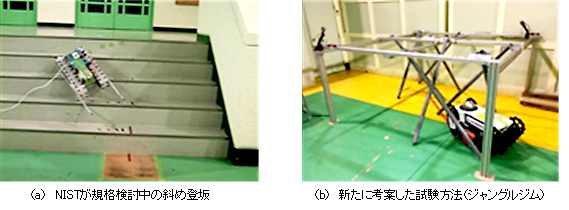
災害現場で用いる陸上移動ロボットの性能評価基準策定に向けた試験を実施 http://www.nedo.go.jp/news/press/AA5_100913.html
インフラ点検や災害対応に活用する「ロボット性能評価手順書」を公表 http://www.nedo.go.jp/news/press/AA5_100962.html
NEDOと福島県がロボット・ドローンの実証に関する協力協定を締結 |