
第三者上空飛行のための無人航空機の性能評価手順書を公表 ―福島ロボットテストフィールドにおける試験で活用可能―
NEDOと経済産業省は、ドローンなどの無人航空機による第三者上空での目視外飛行の実現に向け、「無人航空機性能評価手順書」を、本日、公表しました。
視外・第三者上空で無人航空機を飛行させるためには、安全性のほか環境にも配慮するなど、さまざまな項目において一定の性能を満たすことが必要です。本手順書は、無人航空機が目視外・第三者上空飛行を行うための安全性・信頼性の性能評価基準を設け、試験方法、試験施設・設備・機器を取りまとめたもので、このような性能評価手順書の公表は国内初です。これにより、無人航空機の性能を統一的に評価することが可能となり、機体性能目標の設定や、無人航空機の運用の際の検討材料となることに貢献します。2020年3月に全面開所した福島ロボットテストフィールドでは、関連の試験施設が整備されており、本手順書に基づく評価試験などを実施することが可能です。
今後、本手順書の普及に努め、物流、災害対応などの分野で無人航空機活用の加速を目指します。
 図1 試験で使用した無人航空機
図1 試験で使用した無人航空機
1.概要
近年、小口輸送の増加や積載率の低下などエネルギー使用の効率化が求められる物流分野や災害対応において、無人航空機やロボットの活用による省エネルギー化の実現が期待されています。2019年6月に改訂が行われた「空の産業革命に向けたロードマップ2019※1」では、飛行させる空域や方法に応じて飛行レベル1~4を定義し、2019年度に無人地帯での目視外飛行(レベル3)、2022年度以降に有人地帯(第三者上空)での目視外飛行(レベル4)による無人航空機の利活用を本格化させるとしています。これを実現するための環境整備の一環として、2017年度に国土交通省と経済産業省が事務局となって「無人航空機の目視外及び第三者上空等での飛行に関する検討会※2」が開催され、2018年3月にレベル3の実現に向け「無人航空機の目視外飛行に関する要件」が取りまとめられたところであり、今後「無人航空機の飛行に関する許可・承認の審査要領」に反映される見込みです。こうした流れを受け、今後はレベル4の実現、つまり、目視外・第三者上空飛行の実現に向けた要件検討が求められています。
このような背景のもと、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)は、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト※3」において、無人航空機による目視外・第三者上空飛行の安全安心な飛行を実現する為に、無人航空機が第三者上空飛行を行うための安全性・信頼性に必要な飛行安定性、誘導精度、地上への危害低減に関する機体の性能評価の研究開発を実施しています。
今般、福島ロボットテストフィールド※4を活用した飛行試験データなどを踏まえて、これらの性能評価基準や試験方法などの妥当性について、有識者による無人航空機性能評価基準検討委員会に諮り確認されたことを受け、本成果を「無人航空機性能評価手順書」として策定し、経済産業省とNEDOは本日、公表しました。本手順書は、無人航空機が目視外・第三者上空飛行を行うための安全性・信頼性の性能評価基準を設け、試験方法、試験施設・設備・機器を取りまとめたもので、このような性能評価手順書の公表は日本初です。本手順書により、無人航空機の性能を統一的に評価することが可能となり、機体性能を向上させるための開発や、無人航空機の導入検討の際の判断材料となることに貢献します。
なお、本手順書は、2017年11月22日にNEDOと福島県が締結したロボット・ドローンの実証等に関する協力協定※5の取り組みの一環として、作成されたものであり、2020年3月に全面開所した福島ロボットテストフィールドでは、関連の試験施設が整備されており、本手順書に基づく評価試験などを実施することが可能です。
2.性能評価手順書の内容
無人航空機性能評価手順書は、「目視内及び目視外飛行編」と「第三者上空飛行編」の2つと、今後レベル3やレベル4の展開と共に増加することが予想される無人航空機の長距離飛行において必要となる性能項目や性能評価手順を策定するために、この2つの手順書より、適宜引用するかたちで「長距離飛行ミッション編」から構成されます。
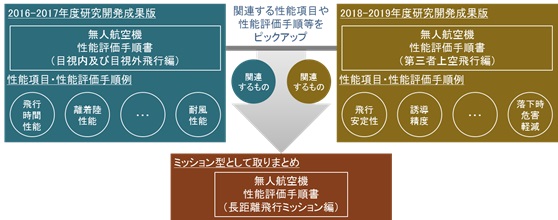 図2 無人航空機性能評価手順書の取りまとめ方針
図2 無人航空機性能評価手順書の取りまとめ方針
(1)目視内及び目視外飛行編
物流、災害調査に共通な無人航空機の性能評価項目について、性能評価基準や性能評価手順を定めています。
.jpg) 図3 性能評価項目一覧(目視内及び目視外飛行編)
図3 性能評価項目一覧(目視内及び目視外飛行編)
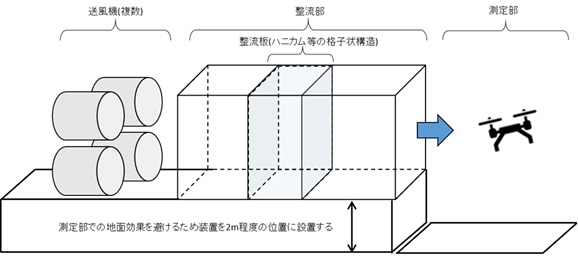 図4 手順書に記載された試験の一例(耐風性能、風洞装置)
図4 手順書に記載された試験の一例(耐風性能、風洞装置)
(2)第三者上空飛行編
第三者上空飛行に関する性能項目について、性能評価基準や性能評価手順を定めています。
.jpg) 図5 性能評価項目(第三者上空飛行編)
図5 性能評価項目(第三者上空飛行編)
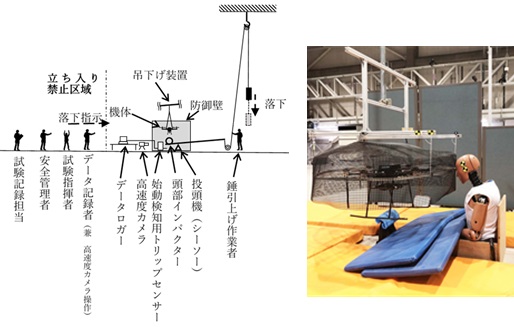 図6 手順書に記載された試験の一例(対人衝突:概念図(左)と試験写真(右))
図6 手順書に記載された試験の一例(対人衝突:概念図(左)と試験写真(右))
(3)長距離飛行ミッション編
長距離飛行ミッションに関する性能項目について、福島ロボットテストフィールドの南相馬滑走路から浪江滑走路間における長距離飛行での検証※6に活用できる無人航空機の性能評価手順を定めています。各性能項目に対する性能評価基準や、試験方法、試験施設・設備・機器については、(1)(2)を参照しています。
 図7 南相馬滑走路から浪江滑走路間の長距離飛行イメージ(左)と長距離飛行ルート(右)) (このルートを飛行する場合においても、航空法のルールが適用されます。この地域での長距離飛行に向けた調整など細部は、福島ロボットテストフィールドへお問い合わせ※7ください。)
図7 南相馬滑走路から浪江滑走路間の長距離飛行イメージ(左)と長距離飛行ルート(右)) (このルートを飛行する場合においても、航空法のルールが適用されます。この地域での長距離飛行に向けた調整など細部は、福島ロボットテストフィールドへお問い合わせ※7ください。)
上記(1)から(3)の性能評価手順書は、以下の経済産業省のWEBページからダウンロードできます。
性能評価手順書(経済産業省)3.今後の予定
今後、NEDOは、経済産業省とともに、福島ロボットテストフィールドの利用を促進するなど、本手順書の普及に努め、物流、災害対応などの分野で無人航空機活用の加速に貢献します。
【注釈】
- ※1 空の産業革命に向けたロードマップ2019
-
小型無人機に係る環境整備に向けた官民協議会で策定されたロードマップ。
- ※2 無人航空機の目視外及び第三者上空等での飛行に関する検討会
- ※3 ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト
-
プロジェクト期間は2017年度~2021年度の5年間を予定、2020年度予算:40.0億円。
ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト
・無人航空機を活用した物流システムの性能評価手法等に関する研究開発(2016年度~2017年度)
・調査用無人航空機の評価手法の研究開発(2016年度~2017年度)
インフラ維持管理用ロボットの開発を強化、基準作りにも着手(2016年6月30日ニュースリリース)
・第三者上空での飛行に向けた無人航空機の性能評価基準の研究開発(2018年度~2019年度)
無人航空機の新たな安全評価基準の開発に着手(2018年5月30日ニュースリリース)
- ※4 福島ロボットテストフィールド
-
物流、インフラ点検、大規模災害などに活用が期待される無人航空機、災害対応ロボット、自動運転ロボット、水中探査ロボットといった陸・海・空のフィールドロボットを主対象に、実際の使用環境を拠点内で再現しながら研究開発、実証試験、性能評価、操縦訓練を行うことができる研究開発拠点。
- ※5 ロボット・ドローンの実証等に関する協力協定
-
NEDOと福島県の連携を強化し、「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」において福島ロボットテストフィールドを積極的に活用することでロボット・ドローンの実用化を加速させ、福島イノベーション・コースト構想の推進とロボット・ドローン産業の活性化を図るべく、2017年11月22日に締結した協定。なお、協定の正式名称は「福島ロボットテストフィールドを活用したロボット・ドローンの実証等に関する国立研究開発法人新エネルギー・産業技術総合開発機構と福島県との協力協定」。
NEDOと福島県がロボット・ドローンの実証に関する協力協定を締結(2017年11月22日ニュースリリース)
- ※6 南相馬滑走路から浪江滑走路間における長距離飛行での検証
-
無人航空機の安全航行のための空間情報基盤の開発(2017年度~2019年度)
ロボットやドローンの社会実装を加速させる新たな研究開発に着手(2017年5月16日ニュースリリース)
- ※7 福島ロボットテストフィールドの問い合わせ先