
- HOME
- NEWS RELEASE
- Demonstration of technologies that enable Unmanned Aircraft (UA) to avoid danger such as failure and stormy weather autonomously
Demonstration of technologies that enable Unmanned Aircraft (UA) to avoid danger such as failure and stormy weather autonomously
From 16th to 24th December, The New Energy and Industrial Technology Development Organization (NEDO), SUBARU, Japan Radio Corporation, Nippon Avionics, Mitsubishi Electric, Autonomous Control Systems Laboratory conducted flight tests to demonstrate technologies that can avoid dangers autonomously under the cooperation of Aichi Prefecture, Toyokawa City, and Tahara City. Specifically, assuming the operation of an UA between remote islands, we demonstrated the capability of an UA to modify its route at its own discretion and to fly to a preset emergency landing point if it detects a failure, fuel shortage, or stormy weather during flight.
This technology makes it possible to operate UA safely even in situations where the communication infrastructure on the ground is insufficient and where operational assistance from the ground is not available.
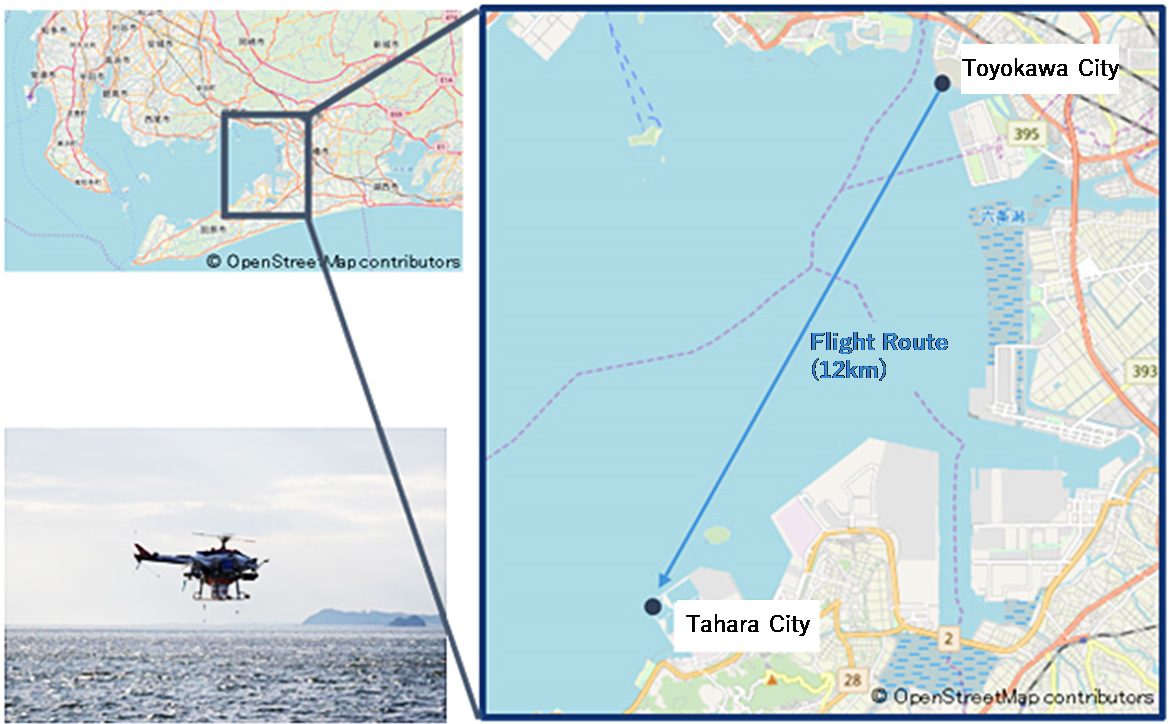
Figure 1 Image of Flight Test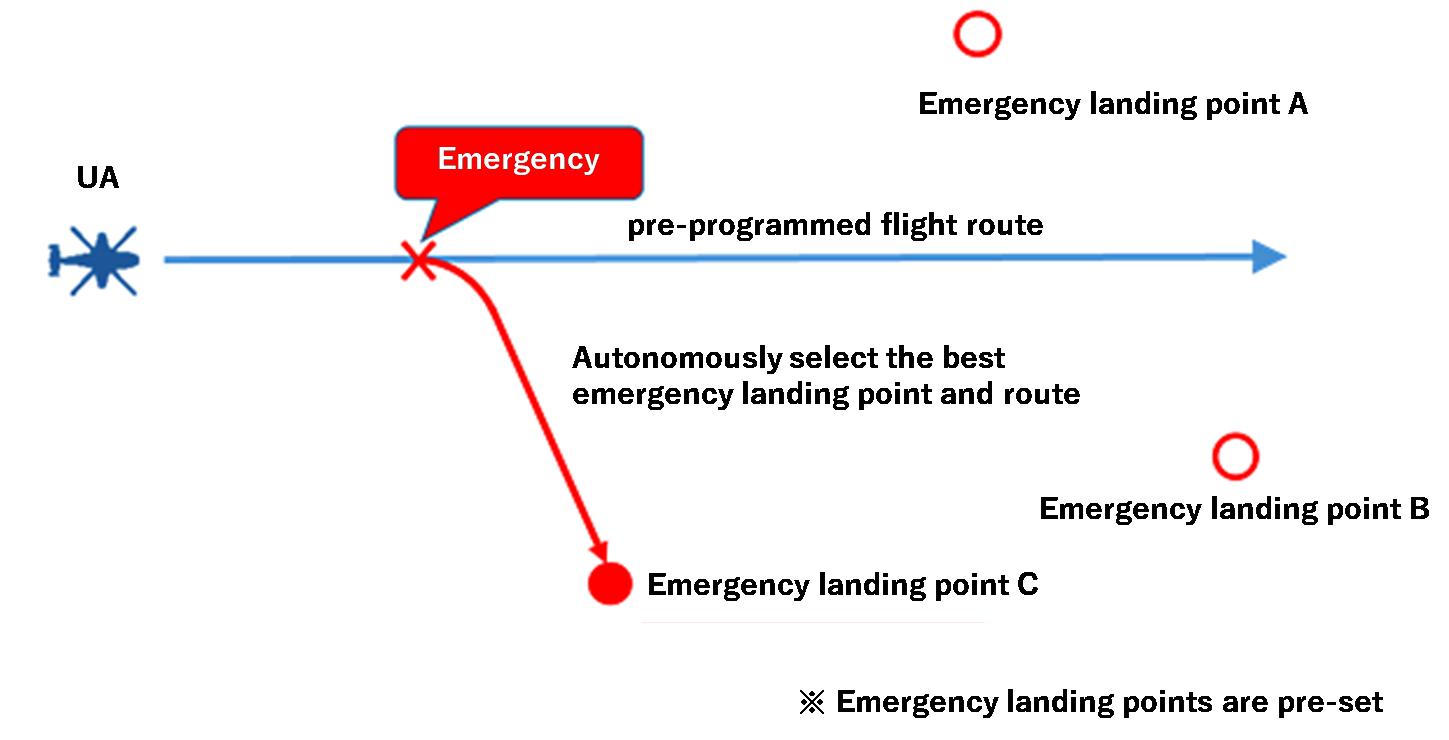
- ※ 1 BVLOS Flight
- Flight in which the operator of the UA cannot visually check the position, attitude and flight safety of the UA. Especially when flying BVLOS for long-distance logistics and infrastructure inspection, safety confirmation and collision avoidance technology are required instead of visual inspection by the operator.
- ※ 2 Flight over people
- Flying over people who are not involved in UA operation. To achieve this, technology that ensures high-level safety and reliability is required.
- ※ 3 Drone traffic management system
- A system for safely and efficiently sharing airspace with multiple UAs by managing the operation of the target drone while referring to the flight status of other UAs, map information, weather information, etc.
- ※ 4 Project
- Project name: Drones and Robots for Ecologically Sustainable Societies project (DRESS project) Implementation period: Five years from FY 2017 to FY 2021 FY2019 budget: ¥3.6 billion.
1. Overview
Small and medium-sized UA is already widely used in agriculture or infrastructure sector, and there are great expectations for applications such as transportation of goods during the disaster, search for victims, and logistics.
In the traffic management system, drone operators can share information on the flight plan of the drone, real-time flight conditions, airspace safety, such as prohibited airspace, with other drone operators by connecting the Traffic Management Function they operate to the Integrated Traffic Management function and Information Provision Function.
In order to realize Beyond Visual Line of Sight (BVLOS)※1 and flight over people※2, it is necessary to provide emergency landing point and the route to it via drone traffic management system※3 in case of failure occurrences, reduction of fuel level, and sudden approach of storm, etc. However, under conditions where the communication environment between the ground and the unmanned aircraft is not sufficient, such as logistics between remote islands (long-distance ocean travel), the autonomous dynamic rerouting technology must be onboard of the UA to respond to various emergencies.
With this background in mind, NEDO is implementing a project※4 to develop UA that can be used for logistics, infrastructure inspections, disaster response, etc., system construction for social implementation, and flight tests. Specifically, we are working on the development of a traffic management system, autonomous dynamic rerouting technology, and international standardization activities.
From 16th to 24th December, we conducted flight tests as a part of development activities of autonomous dynamic rerouting technology at Mikawa Bay in Aichi prefecture. The test demonstrated technologies that enable UA to avoid dangers autonomously.
We have tested the following three functions of autonomous dynamic rerouting technology.
(1) Autonomous route change function in the event of a failure or fuel shortage (2) Autonomous rerouting function in stormy weather (3) Function to fly the changed route using the high-precision positioning information of the quasi-zenith satellite system2. Details and outcomes of the tests performed
<Purpose> Confirming that UA autonomously changes the route from a pre-programmed flight route due to information on failures, fuel shortage, and stormy weather.
<Method> Medium-size UA changes its route autonomously based on a failure simulation signal, a fuel shortage warning signal, and stormy weather simulation information, using high-precision positioning information from the quasi-zenith satellite system.
<Outcome> We confirmed that the UA autonomously changed the route from the pre-programmed flight route responding to the information of failure and fuel shortage and stormy weather, and flew to the pre-set emergency landing point by using the high precision positioning information provided by the quasi-zenith satellite system.