- HOME
- R&D Activities
- R&D of performance evaluation methods for UAV, land robots, and hydro robots
R&D Activities
R&D of performance evaluation methods for UAV, land robots, and hydro robots
| Participants | Autonomous Control Systmes Laboratory Ltd. (ACSL) / Fujitsu Ltd. / NEC Corporation / Ixis, Inc. / Enroute Co., Ltd. / Prodrone Co., Ltd. / Panasonic Corporation / Panasonic System Solutions Japan Co., Ltd. / Aero Asahi Corporation / Subaru Corporation / MItubishi Heavy Industries, Ltd. / Manufacturing Sciene and Technology Center / National Institute of Advanced Industrial Science and Technology (AIST) / The University of Tokyo / EAMS ROBOTICS Ltd.,Co. / Japan Organization of Occupational Health and Safety |
|---|---|
| Overview | ObjectiveThe objective is to promote development of drones which realize the energy-efficient society by setting the performance evaluation standard of each type of robot which utilizing practical robot test fields. OutlineSet the performance evaluation standard of each type of robot (UAVs, land robots and hydro robots) by industrial area (logistics, infrastructure inspection and disaster response) and robot. By repeating the cycle of conducting tests, setting the demanded performance levels based on the test results, and developing robots for each use case at the Fukushima Robot Test Field(RTF)
DurationFY2016~FY2017 |
| Results |
1.R&D of the performance evaluation standard of each type of robot
2.R&D of the manual for robot performance evaluationNEDO and the Ministry of Economy, Technology and Industry (METI) released the "manual for robot performance evaluation" regarding the performance evaluation methods which is to grasp the performance of each type of robot such as those for infrastructure inspection and disaster response before its introduction to real scenes. The manual deals with the demanded items of performance, test methods for performance evaluation, and necessary evaluation tools for tests regarding UAVs for bridge inspection, hydro robots for dams and rivers inspection and land robots for tunnel and plant disaster response, which is based on discussions with robot technology experts and verification results with actual machines under simulated environments.
From now on, NEDO and the METI strive to make the manual prevail, contribute to the boost of utilization of robots for infrastrcture inspection and disaseter response, and the creation of robot-related market for social infrastructure maintenance and update whose size is expected to be 700 billion yen in 2030. Moreover, we have providing insights gained throught this R&D for the Fukushima Prefecture so that tests based on the manual can be conducted in the Fukushima RTF as a part of activities from the cooperative pact regarding verifications of robots and drones utilizing the Fukushima RTF, and the insights will partly be reflected on the design of the Fukushima RTF.
Please download the manual (in Japanese) here
Expected complete image of the Fukushima RTF
2.1 Target robots
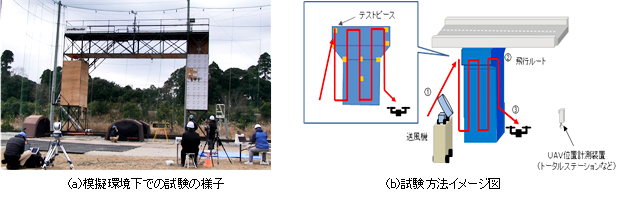
2.2 Contents〈Unmanned aerial robots for infrastructure inspection〉The manual for unmanned aerial robots for infrastructure inspection includes items of evaluation, test methods and test facilities etc. of ・the motion performance regarding stability etc. of UAVs' position around buildings when approaching to points for data collection such as cracks of a bridge ・data collection performance which evaluate the whole process to collect necessary data (such as close-up image and hammering sound data) for bridge inspection utilizing cameras on UAVs and sensors including hammering sound device
Example of a test method in the manual
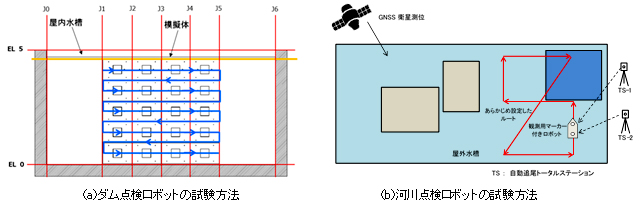
〈Hydro robots for infrastructure inspection〉The manual for hydro robots for infrastructure inspection includes items of evaluation and test methods etc. ・along the process of general and detailed inspection of dam bodies, gates and seam openings ・for checking the visibility under turbid water ・along the inspection process by float robots for river inspection ・to evaluate straightness and rotationality on the moving measurement, and the inspection accuracy
Example of a test method and environment in the manual
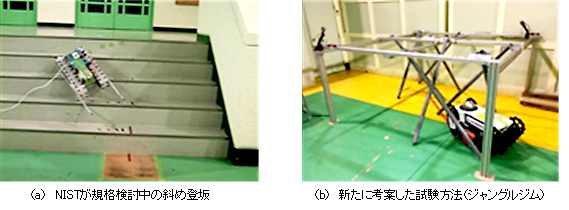
〈Land robots for disaster response〉The manual for land robots for disaster response includes test methods ・of Standard Test Methods For Response Robots (STM) of the National Institute of Standards and Technology of the U.S. (NIST), which is the de jure standard regarding the basic property such as land robots' surmountability ・unique for tunnel and plant disasters ・regarding the "IP" notation, which is increasingly the general term as the performance evaluation of environmental resistance ・regarding anti-explosion performance ・new for the international standardization
Example of a test method and environment in the manual
3.Movie of the R&D achievements from NEDO Channel
|
| Activities and NEWs |
【Related new release and verification movie】
● Reinforces the development of robots for infrastructure inspection and Starts making the standards
● Conducts the test for setting the performance evaluation of land robots for disaster response
|